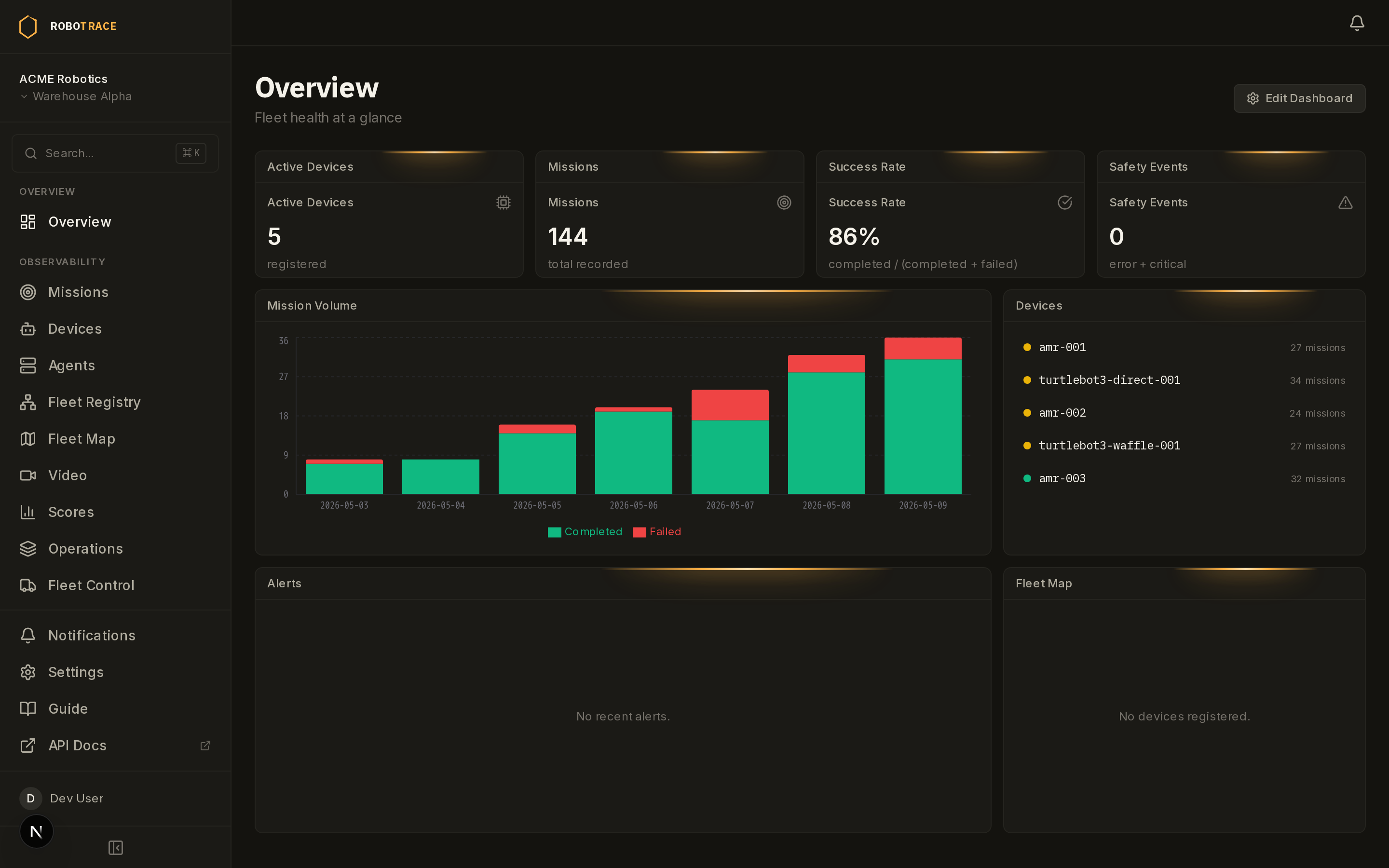
Theoperator'sinstrumentpanel.
Mission tracing, sensor telemetry, video, and fleet control for the people who actually run robot fleets. Find failures before they find you.
What an operator sees
Live KPIs from a reference fleet (sample data).
Your robots run silent.
When an AMR fails in production, the only signal is a Slack message hours later. ROS bag files are huge, proprietary, and live on the robot — not where you can see them. Operators end up guessing.
Three steps to full observability
Instrument
Add 8 lines of Python to your robot. RoboTrace captures missions, sensor data, camera feeds, and scores. Works with ROS2, VDA 5050, and ROSP out of the box.
Observe
Data flows to your self-hosted server in real-time. ClickHouse handles millions of data points. Every mission becomes a searchable, replayable trace.
Improve
See where missions fail. Compare performance across experiments. Get alerted before problems cascade. Export data for ML training.
Everything your fleet needs
Know exactly why missions fail
Every mission is an OpenTelemetry trace. Drill into nested phases, pinpoint the exact step that failed, and score outcomes automatically. No more guessing.
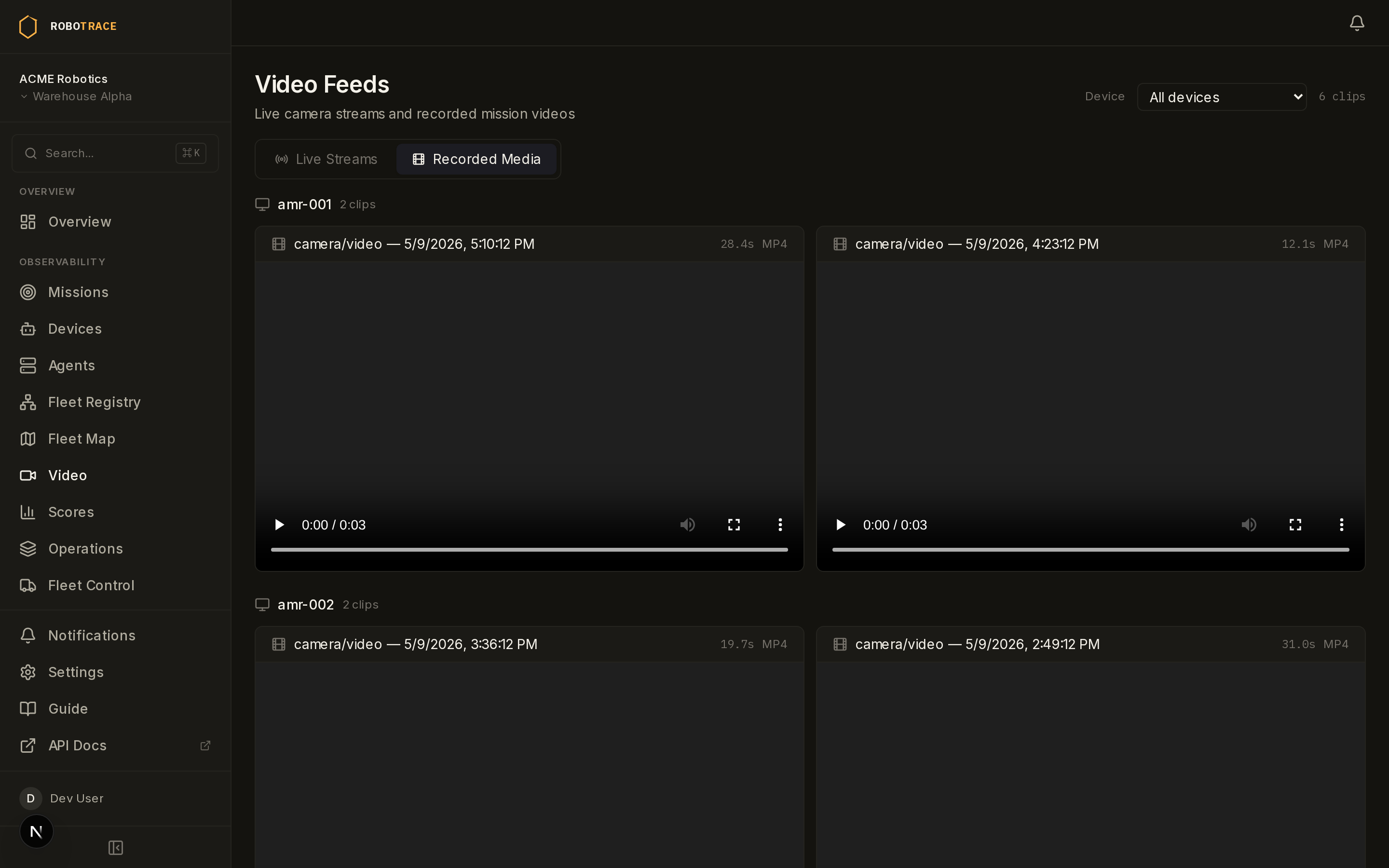
See what your robot sees
Live MJPEG camera feeds stream directly to the dashboard. Missions automatically record video clips. Scrub through footage, see what happened, frame by frame.
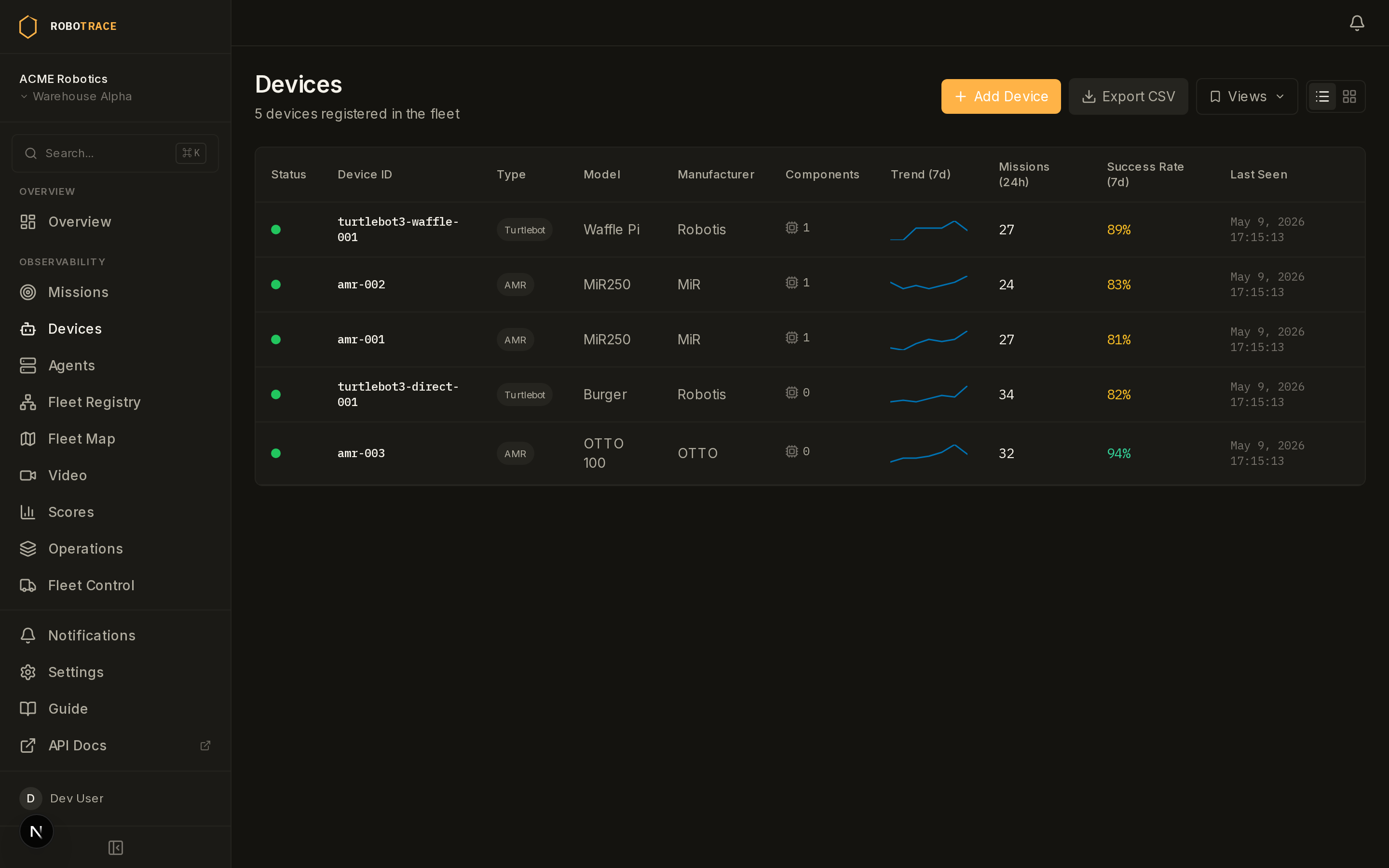
Your entire fleet, one screen
See which robots are online, where they are, what they're doing. Coordinate multi-robot operations. Set geofences. Visualize traffic patterns with heatmaps.
First telemetry in 5 minutes
One install. Eight lines of code. That's it.
pip install robotrace-sdkWorks with
Stop guessing.
Start observing.
Deploy in 10 minutes. Self-hosted. Free forever.
Request an invite
We're onboarding the first 50 fleet operators by hand. Free access during the founding period plus white-glove setup help. Tell us a bit about your fleet and we'll get back to you within 48 hours.